

Herramienta quirúrgica imita tentáculos del pulpo
Por el equipo editorial de HospiMedica en español
Actualizado el 15 Jun 2015
Un manipulador liviano, inspirado en biología, para la cirugía mínimamente invasiva (CMI) ayuda a los cirujanos a acceder y operar en regiones complicadas del cuerpo.Actualizado el 15 Jun 2015
El manipulador biomimético fue desarrollado por investigadores de la Facultad Sant'Anna de Estudios Avanzados (Pisa, Italia) y se compone de dos módulos idénticos pero controlados de forma independiente, con flexión multidireccional y capacidades de refuerzo, que imitan las características de un tentáculo de un pulpo. El movimiento de cada módulo puede ser dirigido inflando de manera gradual tres cámaras cilíndricas equidistantes, ubicadas en el interior del módulo. Alternando la insuflación hacia cada una de las tres cámaras, el módulo puede ser doblado o estirado en varias direcciones.
.")
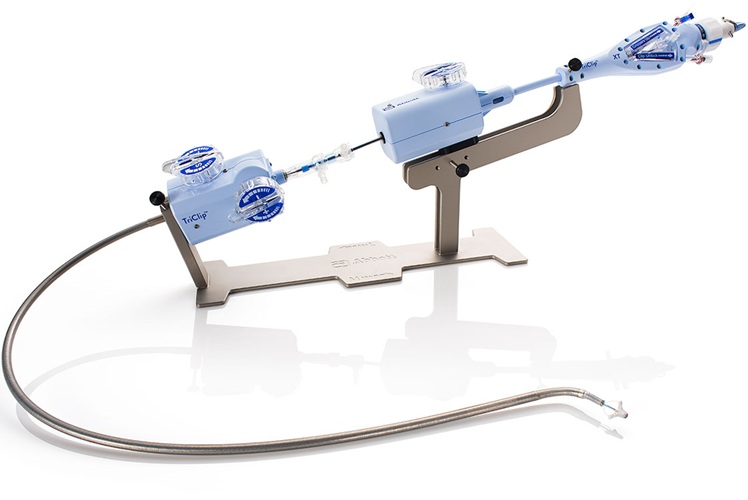
Imagen: El manipulador liviano biomimético para la cirugía mínimamente invasiva (Fotografía cortesía de la Facultad Sant\'Anna de Estudios Avanzados).
El manipulador está compuesto, en su totalidad, de materiales blandos y se puede aprovechar toda su longitud para interactuar de forma dinámica con las estructuras biológicas. Del mismo modo que un tentáculo, este dispositivo tiene rigidez y longitud variables y se adapta fácilmente al entorno circundante mediante torsión, extensión o flexión, en cualquier dirección y en cualquier punto a lo largo de toda su extensión. Para imitar la rigidez variable, se utiliza un fenómeno de interferencia granular, gracias a una membrana flexible colocada en el interior del módulo y rellena con un medio granulado. Cuando se aplica un vacío a esa membrana, su densidad aumenta y toda la membrana se vuelve rígida.
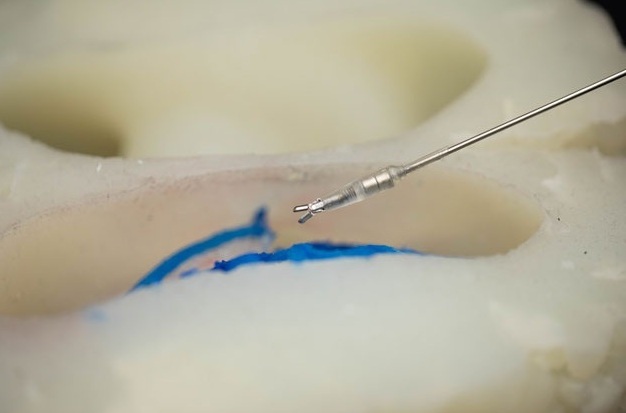
Los investigadores realizaron una serie de pruebas de caracterización del dispositivo robótico y lograron mostrar que podía doblarse en ángulos de hasta 255 ° y extenderse hasta en un 62 % de su longitud inicial. El mecanismo de refuerzo llegó a aumentar la rigidez entre 60 % y 200 %. La capacidad del brazo robótico para manipular órganos mientras se realizan tareas quirúrgicas también se demostró con éxito en escenarios simulados, donde los órganos fueron representados por globos llenos de agua. El estudio fue publicado el 14 de mayo de 2015, en la revista Bioinspiration and Biomimetics.
“Las tareas quirúrgicas tradicionales a menudo requieren el uso de diversos instrumentos especializados, como pinzas, separadores, sistemas de visión y disectores, para llevar a cabo un solo procedimiento”, dijo el autor principal Tommaso Ranzani, PhD. “Creemos que nuestro dispositivo es el primer paso hacia la creación de un instrumento que pueda realizar todas estas tareas, así como llegar a zonas del cuerpo de difícil acceso y sostener de manera segura los órganos que rodean el sitio de destino”.
Enlace relacionado:
Sant'Anna School of Advanced Studies

Miembro Oro
12-Channel ECG
CM1200B
Miembro Oro
STI Test
Vivalytic Sexually Transmitted Infection (STI) Array

New
Double Door Pharmacy Refrigerator
iPR256-GX

New
Prostate Cancer MRI Analysis Tool
DynaCAD Urology